prm motion planning
Probabilistic Road Map PRM Motion Planning INTRODUCTION Given a robots location in a known environment a motion planning algorithm can be used to construct a collision-free trajectory that connects a start configuration to a goal configuration. On the other hand a taskmotion planner must often consider many subtasks a fraction of.

Path Planning Using Prm Download Scientific Diagram
Probabilistic RoadMaps PRM are an effective approach to plan feasible trajectories when these exist.
. In the case of a car non-holonomic. This video introduces the popular sampling-based probabilistic roadmap PRM approach to motion planning. Support fast queries w enough preprocessing Many success stories where PRMs solve previously unsolved problems C-obst C-obst C-obst C-obst C.
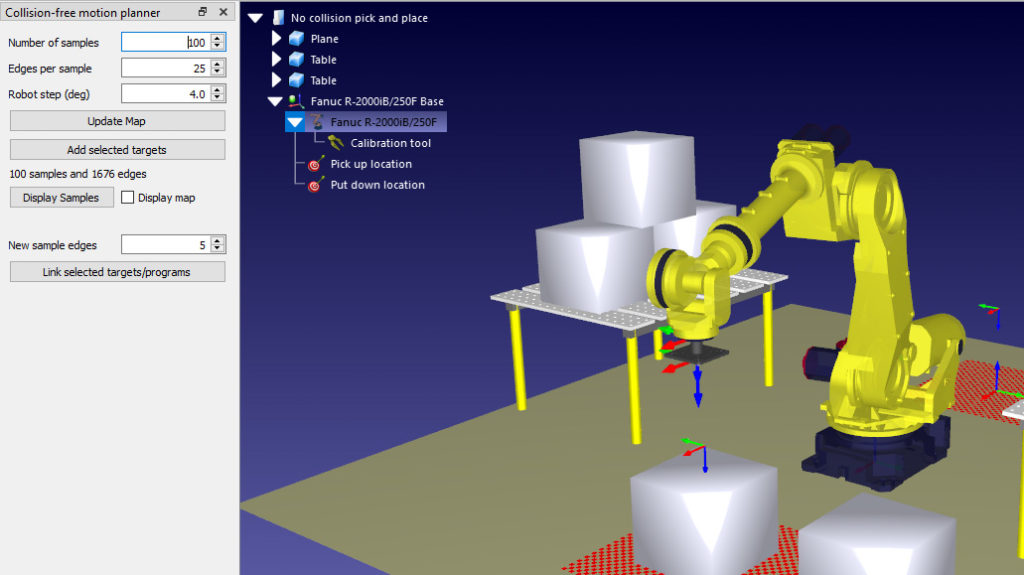
Or with constraints which would require using an infeasible method. Select Displays - Motion Planning - Planned Path - Show Trail to show the swept path Click Executeto run the motion on the Industrial Robot Simulator observe that the multi-colored scene robot display updates to show that the robot has moved to the goal position Repeat steps 2-5 a few more times. Could try by for example following formulation.
Apply easily to high-dimensional C-space 4. Parts mapped to tasks can update logistics planning PFEP APS. It is based on a probabilistic road map PRM algorithm for generating collision free paths between a set of entry and exit configurations for a redundant robot laser cutting machine.
Line balance scenarios can be merged with order details to perform advanced scheduling and operator allocation. The slower construction phase only needs to be performed once whilst the quicker query phase can be repeated many times. In this lab you will implement a single-query.
The two phases are. Motion planning algorithms are used in many fields including. Pybullet_planning includes this package as a built-in component as it is frequently used.
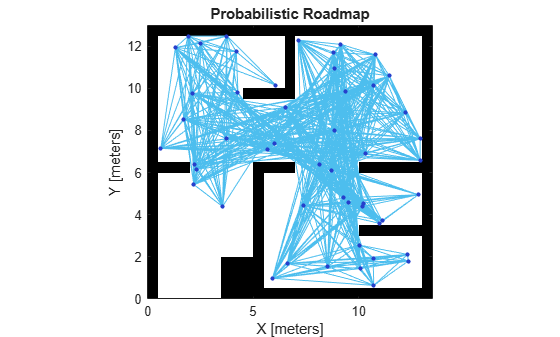
Some of the key aspects of PRM. The base of the arm will be at location 0 0 and the joint angles are measured counter-clockwise as described in class. In an earlier video we learned that path planning based on a true roadmap representation of free C-space is complete meaning that the planner will find a path if one exists.
X t can encode obstacles. Get Started for Free. A major advantage of our approach is that it enables.
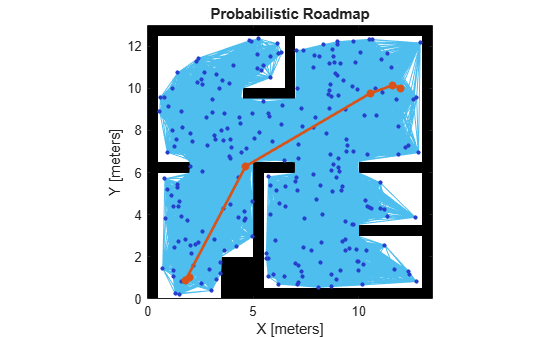
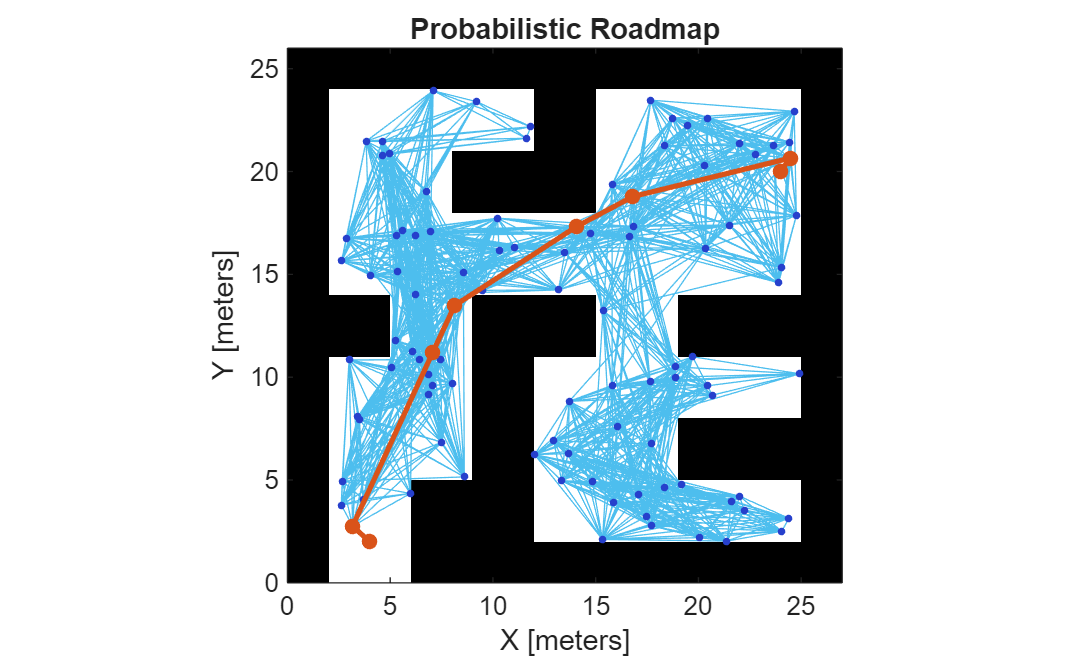
Shortest Path or minimal time Smoothess Motion Planning Constraints. Probabilistic RoadMap Planning PRM by Kavraki samples to find free configurations connects the configurations creates a graph is designed to be a multi-query planner Expansive-Spaces Tree planner EST and Rapidly-exploring Random Tree planner RRT are appropriate for single query problems Probabilistic Roadmap of Tree PRT combines both. Using the PRM Motion Planner There are two distinct phases when using PRM motion planning.
So the same tree can. The sampling strategy ensures that the end effector path complies with process constraints. Variations but also for other sampling-based methods.
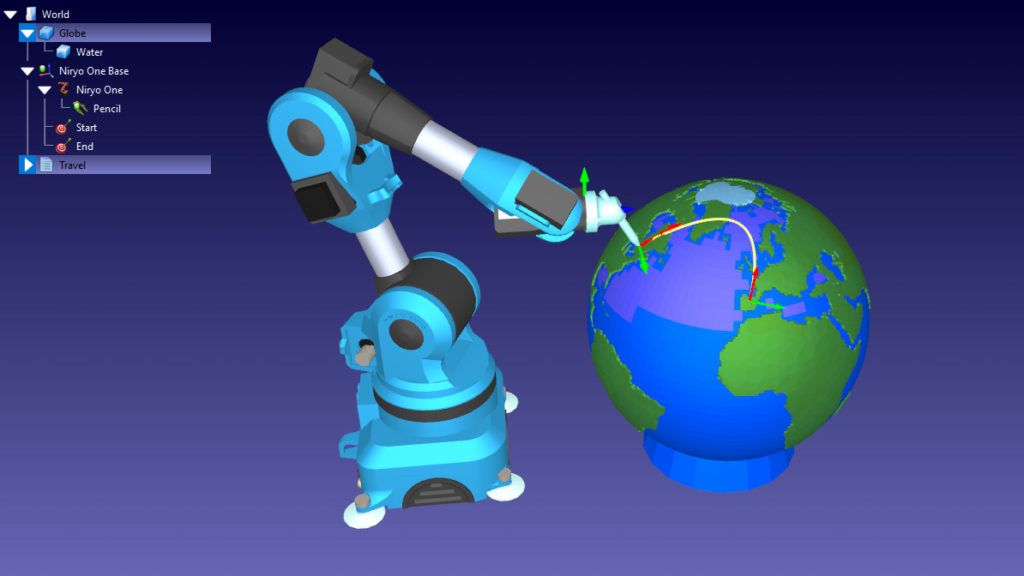
Then the robot can follow the trajectory to safely arrive at the goal location. Since it is difficult to analytically calculate a true roadmap. It involves getting a robot to automatically determine how to move while avoiding collisions with obstacles 1.
These are performed separately in RoboDK which improves the efficiency of the feature. Motion planning is a term used in robotics for the process of breaking down the desired movement task into discrete motions that satisfy movement constraints and possibly optimize some aspect of the movement. PRM for the arm robot You will plan motions for 2R 3R and 4R planar arms.
We propose a new approach for motion planning for nonholonomic car-like robots which is based on a customizable probabilistic roadmap C-PRM. For simplicity each link on the arm will be represented by a line segment. -- Overview Motion planning is a fundamental problem in robotics.
Video Case Study on Assembly PLM. Can work surprisingly well but for more complicated problems with longer horizons often get stuck in local maxima that dont reach the goal Solve by Nonlinear Optimization for Control. This is a fork of Caelans motion-planners repo which is designed to be flexible and independent of simulation platforms.
Introduced an effective approach to solve difficult pathmotion planning problems which otherwise would not be solved with most of the other existing approaches. Avoid all static and moving obstacles Vehicle kinematics and dynamics constraints. It may be stated as finding a path for a robot or agent such that the robot or agent may move along this path from its initial configuration to goal configuration without colliding with any static obstacles or other robots or agents in the environment.
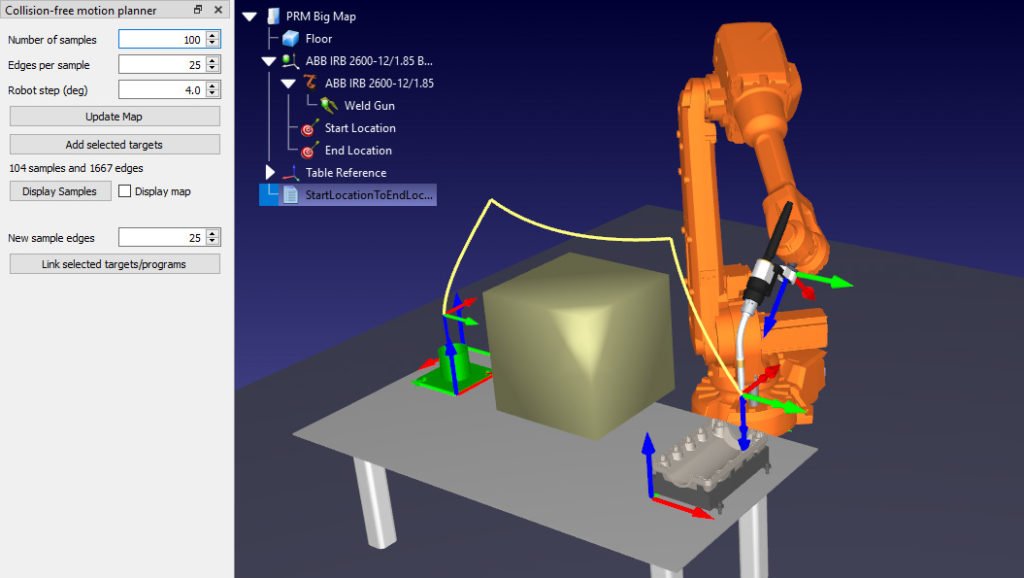
Get a Custom Quote. Why PRM 2 The reason PRM is called multi-query planning methods is that once the roadmap is built and if you have a new target position you can just use the roadmap that is already built. Became the common founding principles not only for subsequent PRM.
However PRM planners are unable to detect that no solution exists. For RRT if you have a new target position you probably need to span the tree more. So it can be reused as many times as you want.
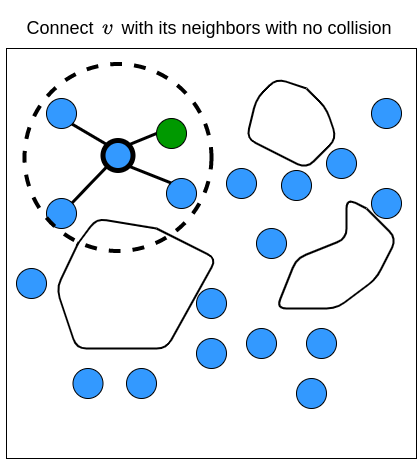
We are now up-to-date with commit e6f23053e of motion-planners. Check for collision free configuration check for collision free path segment consider that the path between two configurations is a straight line parameterized by 01 sample the interval and check each sample whether its collision free for more details on alternative sampling strategies section 534 motion planning. Do not construct the C-space 3.
Motion Planning Motion Planning Objectives. Cannot move sideways or rotate on the spot also called Differential Constraints Challenge.
Probabilistic Roadmaps Prm Matlab Simulink
2
Path Following For A Differential Drive Robot Matlab Simulink
Robotik Ep 3 Multi Query Motion Planning With Probabilistic Roadmaps Prm Rey S Blog Democratizing Robotics

Motionplanninghigherdimensions
Motionplanninghigherdimensions
Back To Basics Robot Motion Planning Made Easy Robodk Blog
Probabilistic Roadmaps Prm Matlab Simulink

A Lazy Probabilistic Roadmap Planner For Single Query Path Planning Semantic Scholar
How It Works Robodk S New Prm Motion Planner Robodk Blog
Why Is Motion Planning A Big Trend Just Now Robodk Blog
Path Planning Using R Prm Download Scientific Diagram
2
2

How Does Motion Planning For Autonomous Robot Manipulation Work Technical Articles

Robotic Path Planning Rrt And Rrt By Tim Chinenov Medium

The Goal Of Motion Planning Is To Find A Path In Free Space Left A Download Scientific Diagram

Prm Probabilistic Roadmap Method In 3d And With 7 Dof Robot Arm Youtube

Motion Planning Algorithms Rrt Rrt Prm Mit 6 881 Final Project Youtube



Comments
Post a Comment